
RRT Connect
Preface
This was a project from the class ROB 320 in which I was taught to use the motion planning algorithm rrt connect to motion plan for a robot with nth dimensional DOF (Degrees of Freedom) robot. This project builds off of the work of my Inverse Kinematics Project I also did in this class.
In Action
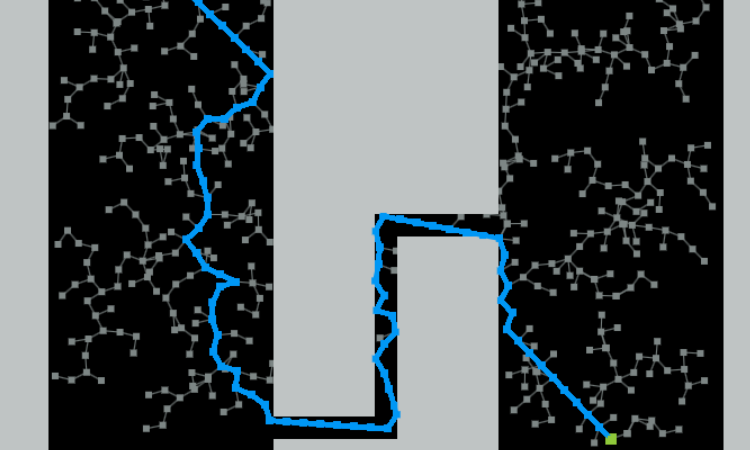
2D Algorithm
Video to be added soon
Nth Dimensional Algorithm
Video to be added soon